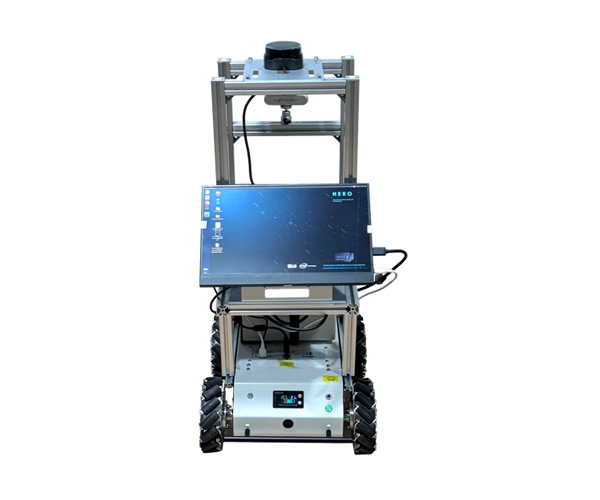
人/机自动化互动平台很快就会在现实成真。 HC-Turtlebot2是一款前沿的异构系统平台解决方案, 拥有超低功耗和超高性能, 旨在加快医疗机器人﹑工业生产机器人﹑自动驾驶汽车等智能自动化的开发。
HC-Turtlebot2完美结合 Intel® 第七代酷睿™ i5-7600T 为主的 CPU 系统与 Arria10 GX 系列的 FPGA 加速板卡, 自成一个长宽高 177X135X76mm 的精巧系统。 CPU 系统能提供强大的开发环境以及各种通用的接口。 透过 CPU 和 FPGA 之间的 PCIe 高速接口进行通信, 让 FPGA 加速卡能对各种用户的应用进行性能加速。 在 FPGA 加速板卡上还预留有如 GPIO﹑USB﹑SPI﹑网口以及 CAN 等丰富接口, 让用户能够连接其他系统或传感器, 实现与更多系统串接扩充的能力。
HC-Turtlebot2完全支持 Intel® Open VINO 工具包, 提供最佳的计算机视觉和深度学习解决方案。 HERO-V 还支持 TensorFlow﹑MXNet﹑Caffe 等主流学习架构。 即便维持现有的系统, 客户也能用最高的计算性能和最低的成本实践他们的 AI 应用程序, 同时, 边缘到云端的异质执行, 也能轻易在HC-Turtlebot2 板上实现。
产品参数:
1、采用激光雷达技术
2、使用体感摄像头实时获取场景信息
3、大功率电机及驱动板
4、机器人金属机构
5、丰富的外设接口可以连接各类传感器和控制器: 陀螺仪、 充电座红外接线器、 音频端口及扩展接口
6、配备显示器、 音箱、 麦克风
7、软件含: Ubuntu16.04 、 英特尔 OpenVINO 开放视觉推理与神经网路优化软件开发工具套件、ROS/ROS2 机器人操作系统 、英特尔 AHRI 自适应人机交互开发软件库 、ROBOT STUDIO 、VISUAL SLAM SDK 、 Quartus Prime 等
8、开放的编程接口和便捷的开发程序
9、集成了搭载英特尔酷睿 i5 或 i7 CPU 的主板
10、平台定制的英特尔 Arria 10 FPGA 加速卡以及固态硬盘
11、可以加配多达三根英特尔 Movidius TM 神经元计算棒
12、FPGA 加速卡的超强计算能力, 能以极高的频率运行 SLAM 算法
13、提供人工智能开发课件包(含开源代码)
OpenVINO 实验目录
1. 神经网络基础
1.1 神经网络基础
1.2 前向神经网络模型
1.3 神经网络训练和优化
1.4 OpenVINO 工具包的安装和配置
1.5 人工智能与边缘计算
1.6 深度学习和机器视觉
1.7 交通灯车流检测 Demo
2. 卷积神经网络基础
2.1 卷积神经网络概要
2.2 AlexNet 卷积神经网络
2.3 VGG 卷积神经网络
2.4 GoogLeNet 卷积神经网络模型
2.5 ResNet 系列卷积神经网络模型
2.6 Open VINO 平台介绍
2.7 OpenVINO 使用
3. 目标检测基础
3.1 目标检测的基本概念
3.2 基于候选区域的目标检测 R-CNN
3.3 Fast T-CNN 目标检测算法
3.4 Faster T-CNN 目标检测算法
3.5 Yolo 算法
3.6 SSD 目标检测算法
3.7 MobileNet 目标检测算法
3.8 基于 OpenVINO 的手写体识别
4. 基于 OpenVINO 的目标识别
4.1 使用 Open VINO 工具包实现目标检测的过程
4.2 模型优化器和推理引擎的使用
4.3 基于 Open VINO 的车牌识别基于 OpenVINO 的边缘计算应用
5.1 智能交通灯控制
5.2 智慧教室
5.3 危险品识别
ROS 实验目录
1. ROS 入门教程
1.1 安装并配置 ROS 环境
1.2 ROS 文件系统介绍
1.3 创建 ROS 程序包
1.4 编译 ROS 程序包
1.5 理解 ROS 节点
1.6 理解 ROS 话题
1.7 理解 ROS 服务和参数
1.8 编写简单的消息发布器和订阅器 (Python catkin)
1.9 在机器人上运行 ROS 2.移动平台与 python 教程
2.1 实现前进
2.2 实现后退
2.3 实现原地旋转
2.4 实现左向旋转
2.5 实现右向旋转
2.6 实现带避障的直行导航
2.7 实现走方形
2.8 实现多点拍照
2.9 实现线速度标定
2.10 实现角速度标定
3. 移动平台教程
3.1 编写第一个 ROS 脚本
3.2 创建地图
3.3 自主行驶
3.4 编码实现前进和避障
3.5 编码实现定点导航
3.6 跟随实验
3.7 全景地图演示
3.8 激光雷达构建地图4.移动平台 DL 入门教程
3.9 深度学习框架 Caffe 安装
4.1 深度学习框架 TensorFlow 验证例子
4.2 深度学习框架 mxnet 验证例子
4.3 深度学习框架 py Torch 验证例子
4.4 TensorFlow 应用
4.5 Pytorch